Motivation:
In taking our project to the next level, we wanted to allow our robot to draw on a large curved surface. This repository is for calculating the trajectory for following the curved wall.
Input:
Mesh wall in .obj file form
Output:
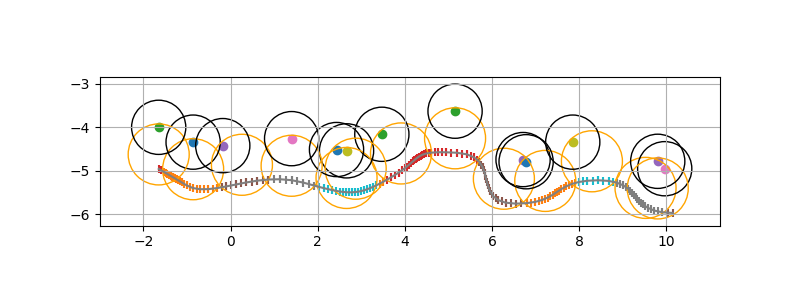
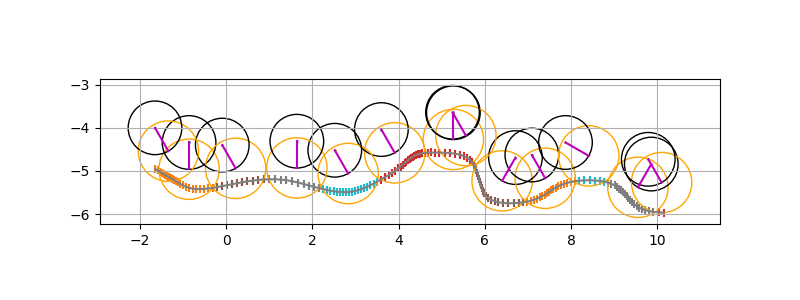
ridgeback trajectory
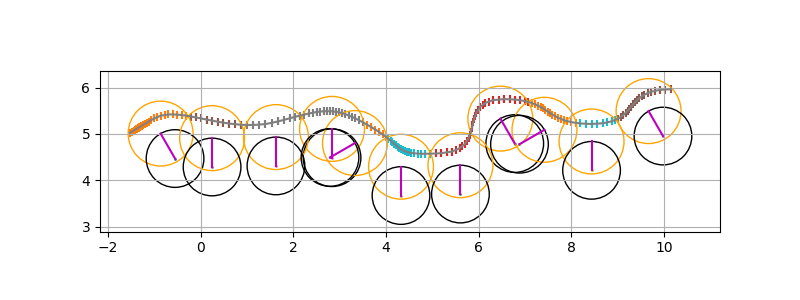
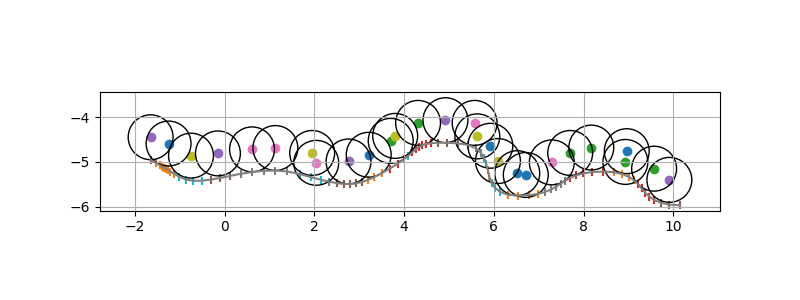
something like this:
X:-1.65, -0.86, -0.09, 1.64, 2.52, 3.6, 5.25, 5.27, 6.71, 7.09, 7.87, 9.79, 9.86
Y: -4.0, -4.34, -4.4, -4.31, -4.52, -4.04, -3.64, -3.65, -4.69, -4.63, -4.34, -4.73, -4.84
Problems:
The repository is still going under constant modifications 😊 If you have any suggestions, your help will be greatly appreciated 😊
How To Use:
I warned you that it still needs more work… but if you are willing to wait…🐢
- Place your .obj file in /input
- Open trajectory_planning_v10.py
- Change the file_name to your file
- Hit run and WAIT
- Look at the terminal for progress and result
Progress Stages
2021.08.09
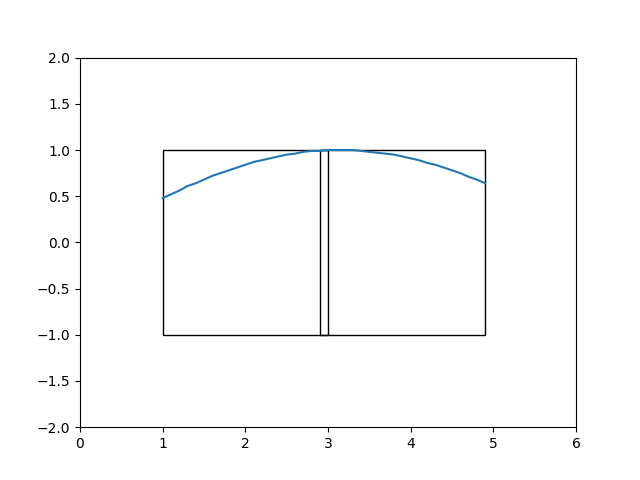
Started by covering a simple wall with squares
2021.08.10
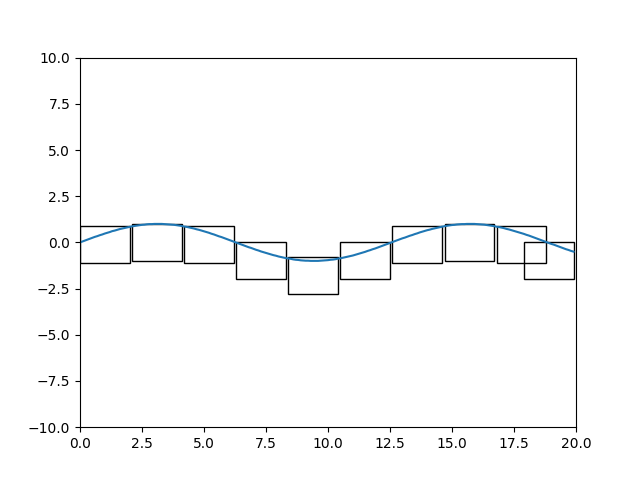
Started by covering a complex wall with squares
2021.08.11
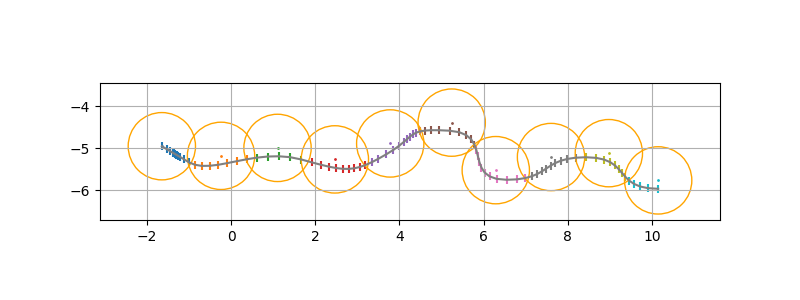
Started by covering a wall with circles
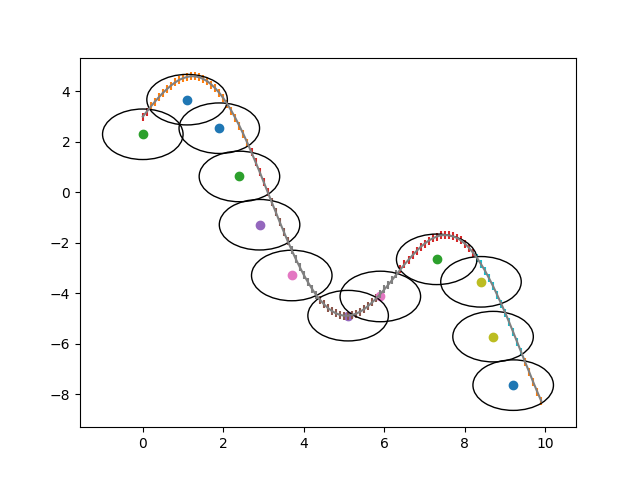
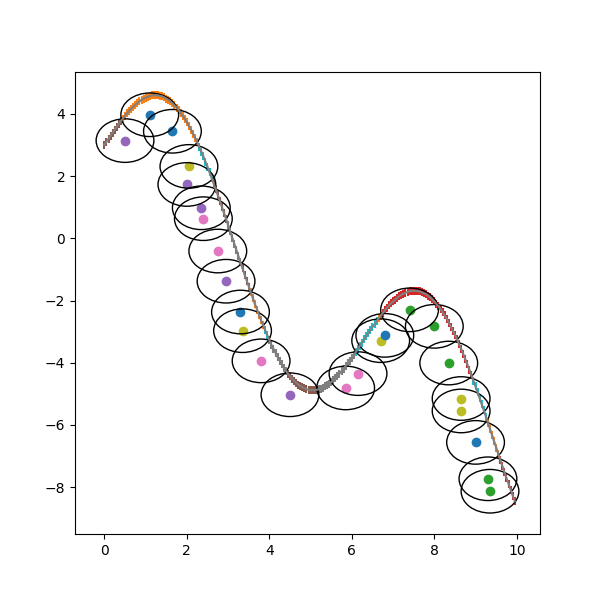
2021.08.21
Started by covering a wall with small circles for better trajectory
2021.09.10
Update minor changes
2021.09.11
Realized that I have not considered the actual robots -> fixed the problem but now it is super slow 😔
2021.09.26
Started considering iiwa and wall collision

2021.09.30
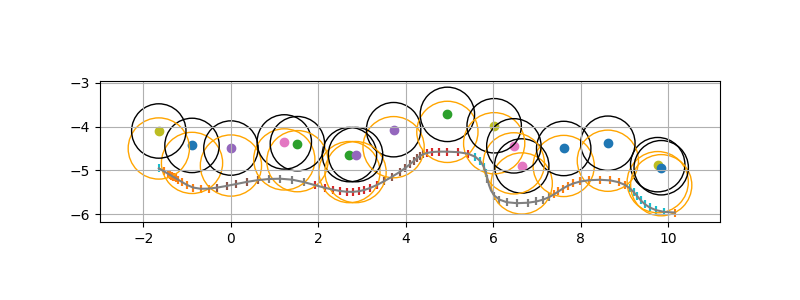
Due to the deadline moving up, needed a trajectory that ensures least movements.
Trajectory that puts ridgeback side to side (v8).
2021.10.09
Updated configurations to match gazebo world + cleaned up algorithm to have better efficiency